







- 1‧ 2008東元科技創意競賽‧

14 Eco-Spirit 趴趴走的空間精靈
單位:成功大學-奈米科技所、機械工程所、工程科學所、建築所
隊長:陳柏維
隊員:張廉楷、潘晨安、陳鵬倫、賴漢文
團隊介紹
本團隊由蔡明祺教授、陳國聲教授、鄭泰昇副教授與姚武松博士帶領,結合奈米科技暨微系統工程所、機械工程所、工程科學所和建築所,希望藉由跨領域整合能夠激發出更多的創意與成果。隊長陳柏維負責空間動態模組的多載具定位、運動控制與無線感測技術。隊員潘晨安設計整體智慧建築情境架構並且導入綠色概念於生活空間。隊員張廉楷負責壓電致動器的研發,以及致動器結合線性滑軌的分析測試。隊員陳鵬倫與賴漢文負責驅動電路設計、整合DSP相關元件與太陽能充電照明功能。
創作動機
智慧化居住空間的建構與發展,是目前政府推動的重大科技發展方向,包含「安全安心」、「健康照護」、「永續節能」、「便利舒適」四大主題,近年來隨著智慧與通訊科技迅速發展,人們在日常生活中已與科技緊密結合,為因應國際發展趨勢及台灣未來科技產業發展策略方向,以建築環境為載體,運用相關智慧化技術於居住空間之中,建構優質智慧化生活環境,已成為下世代發展的必然趨勢。本作品從模組化致動器之研發導入,配合無線驅動操控及感測系統之開發,建構模組化的空間表層機器人,並導入綠色科技相關題材,實現創新的綠色建築空間。

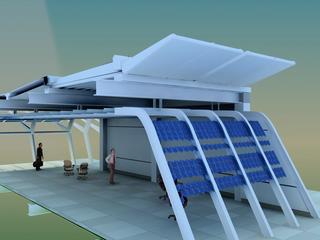
群體空間精靈於立面上移動遮
陽,並且調節採光與通風
創作過程
本團隊欲開創一個可主動回應、動態改變的智慧空間,我們把模組化的「動態表層單元」,整合到建築空間中,並重新檢視建築構造、空間計畫等議題,因此提出一套動態空間的使用情境方案。在這個情境提案中,使用者可以藉著紅外線感測技術控制各個模組,掌握所在位置,一部分模組移動到空間外緣陽光處,另一部分則分布在空間深處。位於空間外緣的模組可遮蔽日照並吸收太陽能產生電力,藉著上蓋翻轉角度調節遮陽角度;位於空間深處的模組則作為照明燈具,依照不同的使用需求彈性改變燈具配置。五位團隊成員清楚地分工,不僅要完成各自負責的部份,在技術整合時所遇到的困難與挑戰更需要大家合力解決。
群體空間精靈合併示意圖
作品介紹
將感測器與致動器導入智慧化居住空間,使空間具有感應、彈性、 與互動性,能因應天氣與居住者的行為,自動產生空間的變形,由數百個空間機器人組合而成的智慧空間,將改變傳統上對於智慧化居住空間的概念。將空間視為另一個巨大的機器人,每一個空間體,由數百個微小的機器人組合而成,為了落實機器建築的實驗,本團隊聚焦於空間牆體的動態單元實驗,將感測器與致動器結合到空間牆體的設計,研發建築空間中:
1. 趴趴走的空間精靈-在空間自走的機器人。
2. 因應調節採光與通風而變形的空間精靈。
3. 太陽能充電的空間精靈。
幾組趴趴走的空間機器人將組合成一機器建築,具有:
1. 動態的牆。
2. 流動的牆。
3. 會發光的牆。
4. 會呼吸的牆。
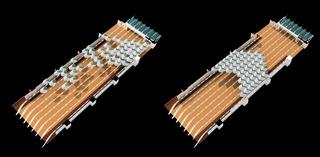
群體空間精靈於屋頂表層移動產生
各種不同的圖形變化,可至特定區
域導風導光、遮陽或照明。
整合四種Types的建築表層
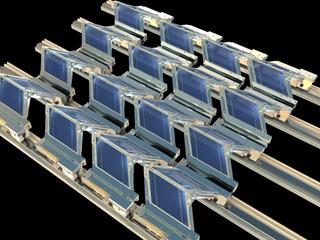
本團隊將空間動態表層模組化,整合環境感測與壓電致動技術,由Wiimote系統負責定位與運動控制,使表層單元可以在空間中來去自如,移動至戶外吸收太陽光能,儲存於電池後回到室內特定區域照明,並且需在「光度不夠」及「該區域有人員活動」的兩種條件都成立下才利用LED照明。整體模組與各部元件,由軌道嵌入銅線傳導市電及太陽光儲能裝置兩種方式來供電,以符合綠色建築與智慧化生活空間的目標。

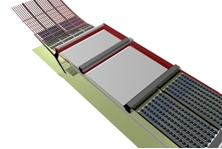
空間表層單元─上蓋翻轉(1)
空間表層單元─上蓋翻轉(2)

空間表層單元俯視照片